Рис. 94 Варианты установки манипулятора
‹-› Устройство поступательного движения ‹поворотное устройство
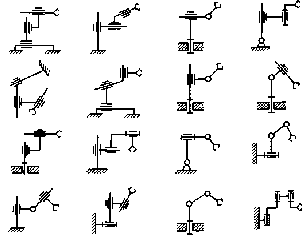
Рис. 95 Примеры кинематических схем манипуляторов электропривода и системы контроля за траекторией движения манипулятора. В систему контроля входят устройства регулирования тока электропривода, регуляторы частоты вращения и положения манипулятора. В отдельном шкафу размещено командно – программное устройство и телевизионный экран системы контроля и управления.
Рабочие зоны манипулятора и зоны опасности. Зоны действия манипулятора (рис. 93) – это рабочее пространство, зона перемещения вспомогательных устройств манипулятора (его направляющих, противовесов и т.д.) и зона опасности. При налаживании манипулятора определяют его запрограммированное рабочее пространство, размеры которого меняются от задачи к задаче.
Структура манипулятора в зависимости от его размещения на рабочем месте. Из рис. 94 видны возможные варианты установки манипулятора и характер движения его основных элементов в различных условиях. Стрелки на рисунке показывают виды движения устройств манипулятора.
На рис. 95 приведены примеры кинематических схем различных вариантов манипуляторов.